RobotMail No.2022.8.22
RobotMail No.2022.8.22
望秋弥茂1. 序
暑假过去大半才想起来没有写学期小结(嘻嘻)
原来有人前两天才放假啊?
原来有人放假休息两天又开始干活啦?
是哪个倒霉蛋呢?
原来是我啊……
就让大怨种再来回忆一下上学期吧!就要和大二挥手告别了呢!
2. 学业杂谈
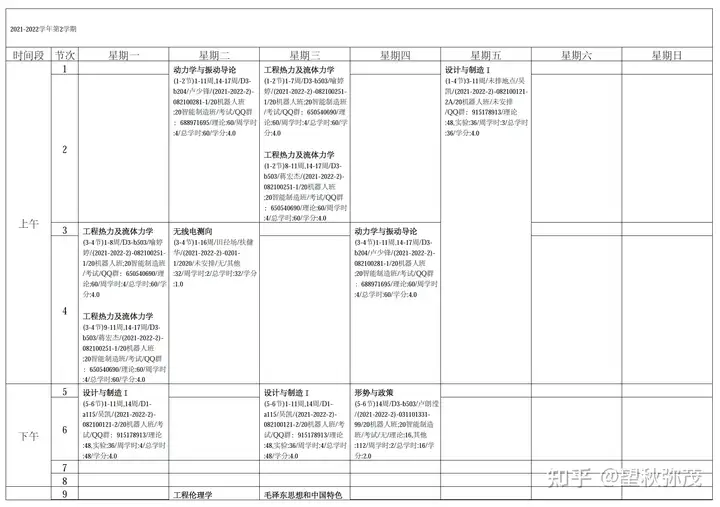
2.1 设计与制造
首先是设计与制造这门课,又爱又恨的一门课。
唉!此话怎讲呢,这门课的中文前身应该是机械设计原理吧(大概是这个名字),形式上也保持一致,上好几个学期,但是内容部分我是一点都没兴趣,基本上是在讲加工方法(对,你没有听错,就是金工实习的内容的理论方面),是真的条条框框一点都不想看,我好恨啊啊啊啊啊!!!!
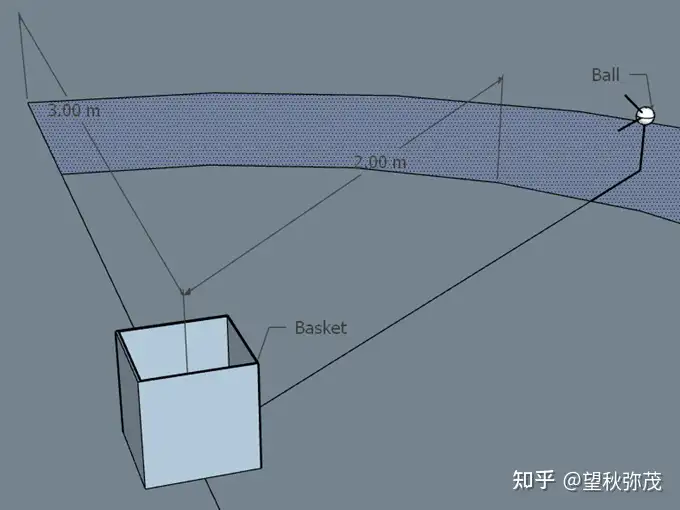
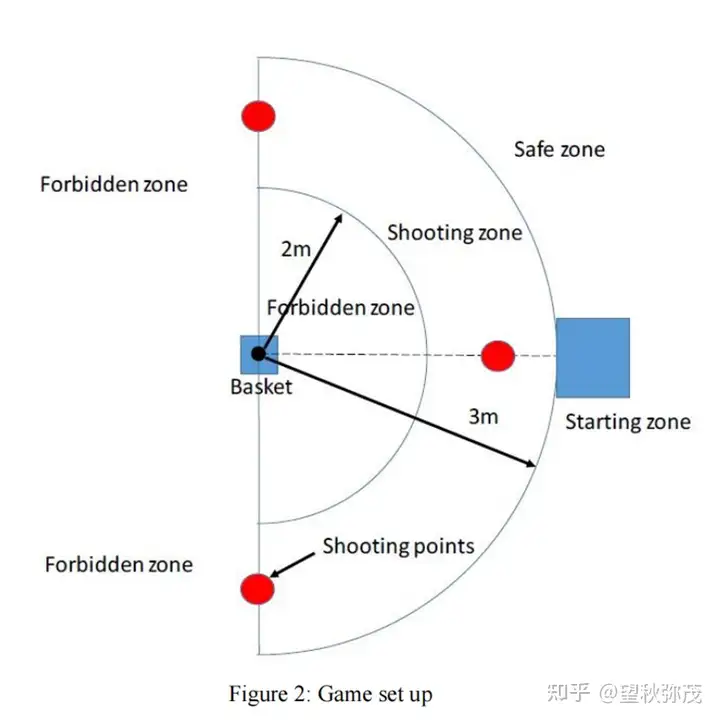
但是这门课依旧延续了之前工程导论的风格,每组给予2.5k经费制作课设,但是与往常有所区别的是设计遥控发球的机器人,整体来说还是有些新意的。

单纯从课设的角度来说,这门课还是有意思的。
但从自己的角度来说,作为弹道滑轨设计者严重失职,导致最后成绩非常差。没有考虑到滑轨上左右震动以及摩擦轮弹口的初速度不可控,导致我们的操作手需要极度小心,确保每一粒球都在稳定可靠的情况下得到摩擦轮的加速弹出,以及对摩擦轮的转速恢复需要观察,耽误了一定比赛时间。
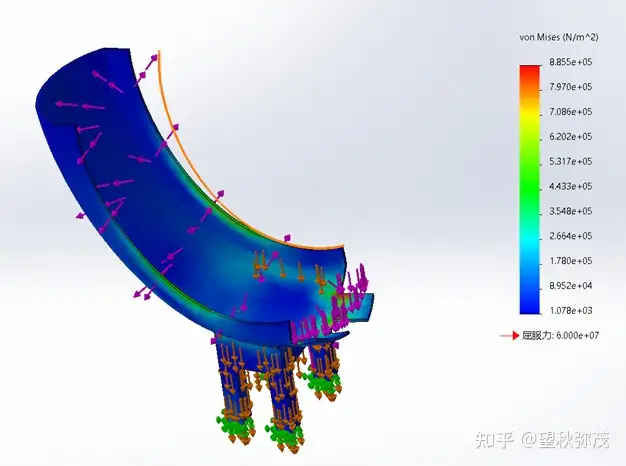
这次课设受益匪浅,让我深刻意识到很多时候你的设计不是想当然,必须严格考虑到动力学和材料力学的情况,还有进行仿真的必要性。否则最后的结果是必然不好的,不光是课设,其实或许以后的工作中的设计也是如此,必须谨慎而细心,否则你的设计就是无效的,而且也会浪费许多不要的资源(滑轨碎了一次重新3d打印)。
2.2 动力学与振动导论
这门课总体来说不难,延续了一定的大学物理的刚体力学的内容,也使用了一定的固体力学的方法,并且进行一定的延申,我觉得是非常实用且有趣的课。
可惜鄙人的matlab的coding能力不强,对于两次project的coding部分都一筹莫展,花了许久时间。
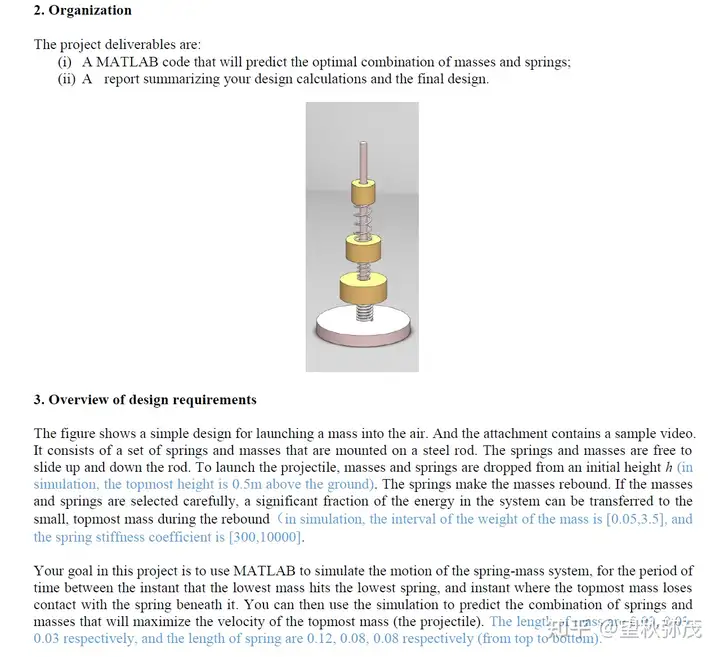
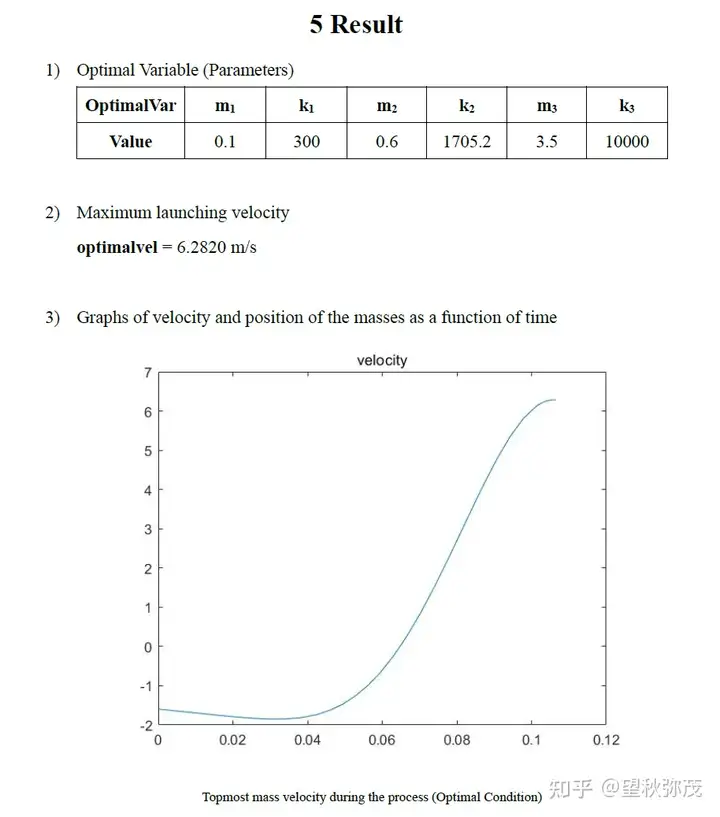
简单来说,是给定了弹簧和重物的参数范围,设计确定这些参数,使得的重物反弹后的发射速度最大(芜湖!起飞!)
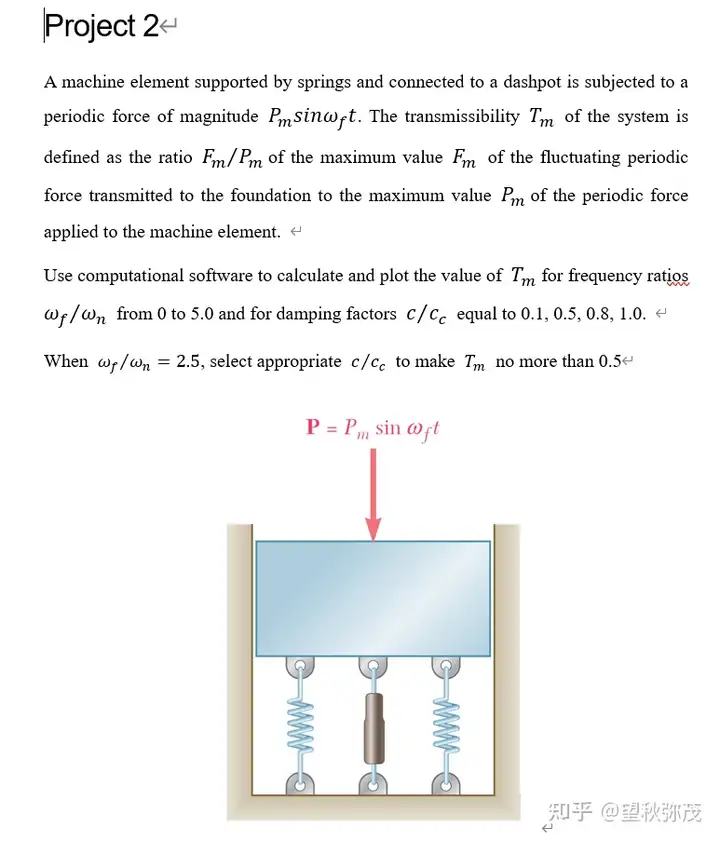
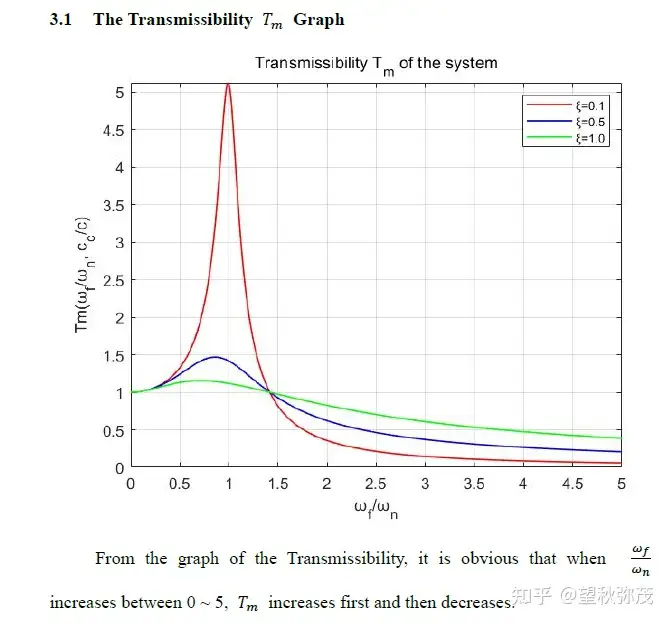
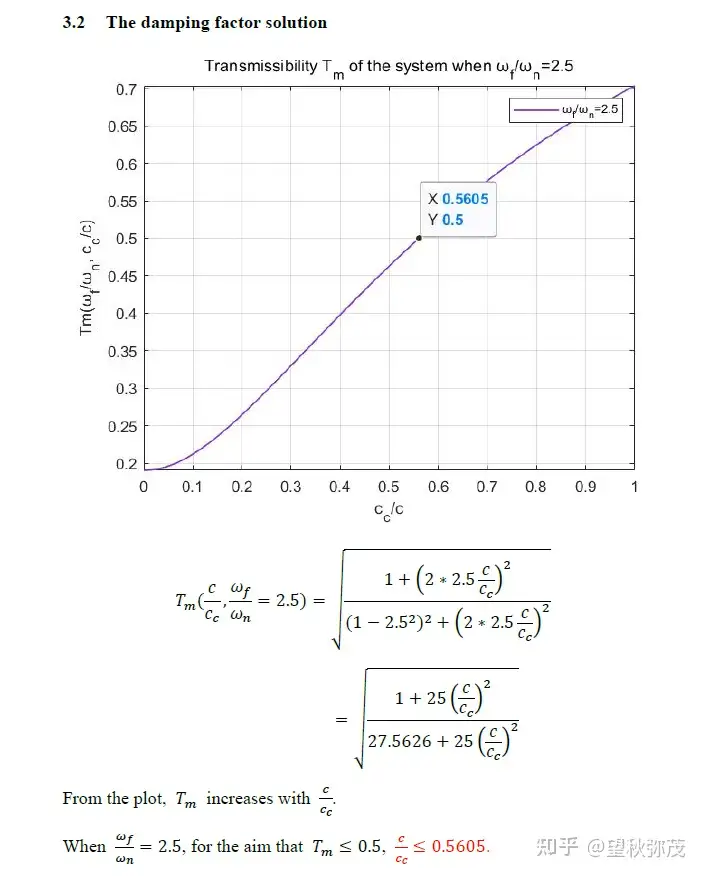
简单来说,是确定如图这样的系统的一个参数——transmissibility,它随着frequency ratio的变化图,以及如果系统设定该参数小于0.5时,damping factor的范围是多少。
2.3 工程热力学与流体力学
emme,这门课我有点黑人问号,我其实不太懂为什么机器人会学这些东西……
但是呢,还是学习的比较认真(指期末考前疯狂补课)
可能还是自己不太感冒这些课吧……
3. 中科院学习
我是在7月左右投递的个人简历和报名中科院深圳这边的暑期学校吧,然后按部就班给这边导师发了邮件,最后7月11号收到邮件,来了这边进行学习。
其实自己并没有做特别多的工作,相反的,摸鱼时间比较多(有点不好意思)。
主要是以学习为主,这边导师人很好,实验室的师兄师姐都给予了我极大的帮助。
在这差不多一个月的日子里面吧,从相机标定到自动驾驶一些基础了解,再从slam的初步入门到多智能体的一些学习,自己感受到了多种多样的学习方向,也为自己以后的研究生的方向给了一定的参考,这是我觉得非常难得的经历。也让一直困在学校里面死读书的我,有一次宝贵的机会,去近距离参观学习当前自动驾驶的研究。
4. 终
这学期理论上应该是大学以来最充实的一个学期和假期
从大创申报,到加入WUSIE Lychee Lab,再到中科院的学习参观
虽然比起周围人来说可能不那么耀眼
但是对于我自己来说,已经受益匪浅
最后还是祝愿所有前前后后帮助自己的师兄,师姐以及唐老师、李老师~~

“白日的时光静寂缓慢, 我们注视着前方,努力不使之偏向, 就像夏日的红玫瑰逐日盛开, 时光寂静流逝,永不复返。”